



Sommario Contenuti
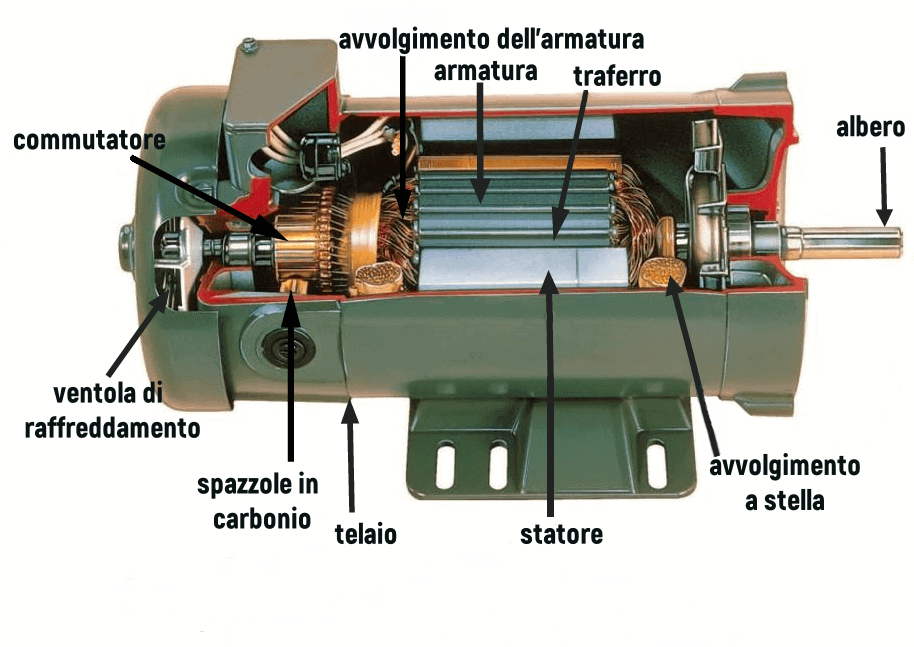
Struttura del motore
Qual è la differenza tra motore sincrono e asincrono (motore a induzione)
I motori elettrici sono definite macchine, una macchina è un dispositivo capace di trasforma una certa energia in un’altra dello stesso tipo o diverso; le macchine elettriche quindi sono convertitori elettromeccanici in grado di trasferire energia da un sistema elettrico a un sistema meccanico, o viceversa, basando la loro funzione sull’induzione elettromagnetica.
Nell’ambito delle macchine elettriche si possono sostanzialmente distinguere due elementi principali: statica e rotativa.
Le cosiddette macchine elettriche statiche sono tutte quelle in cui non c’è movimento meccanico, non essendoci parti in movimento. Tra le macchine elettriche statiche sono comprese ad esempio, trasformatori, convertitori, regolatori, inverter, ecc.
La macchina statica per eccellenza è il trasformatore di potenza, il cui compito è convertire l’energia elettrica in ingresso in energia elettrica in uscita, variando la tensione tra le induttanze primarie e secondarie a potenza costante.
Anche le macchine elettriche rotanti o dinamiche sono dotate di parti meccaniche rotanti, come nel caso della dinamo, alternatori e motori. All’interno di questo gruppo esiste una doppia classificazione, poiché i motori consumano energia elettrica e la convertono in energia meccanica di rotazione, mentre la dinamo e gli alternatori (vengono definiti come generatori) sfruttano l’energia meccanica di rotazione per produrre energia elettrica.
I motori possono essere progettati per funzionare in corrente alternata (AC) o in corrente continua (DC).
I motori AC sono classificati in due tipi;
- Motori Sincroni;
- Motori Asincroni.
Entrambi condividono alcune somiglianze, ad esempio nella loro costruzione, ma sono molto diversi nel funzionamento e nelle prestazioni.
Come funziona il motore a corrente alternata?
Un motore CA è un motore elettrico che utilizza la corrente alternata, inventato da Nikola Tesla, è utilizzato in dozzine di applicazioni in ogni luogo del mondo produrre energia meccanica utilizzando il magnetismo miscelato con la corrente alternata, la struttura di un motore CA include una serie di bobine le quali producono un campo magnetico rotante all’interno di un rotore collegato a un albero di uscita.
I motori a corrente alternata, utilizzati da anni, sono estremamente utili per ingegneri e progettisti poiché possono essere applicati a diverse applicazioni. Il vantaggio principale di un motore CA è la sua capacità di produrre una coppia costante fino alla velocità nominale.
I componenti principali di un motore a corrente alternata sono lo statore, il tamburo esterno fisso e il rotore, la parte interna rotante fissata all’albero del motore. Lo statore e il rotore producono campi magnetici rotanti. L’avvolgimento dello statore che crea il campo rotante è creato dalla corrente alternata.
Il termine motore CA identifica diversi modelli quali: motori monofase, trifase, frenante, sincrono, asincrono, personalizzato, a due velocità e monofase a tre velocità. La differenza tra le varie versioni riguarda il tipo di lavoro che viene richiesto, tali motori sono utilizzati per piccoli lavori mentre altre versioni sono progettate per lavori più grandi e più impegnativi. Una differenza fondamentale è la fase dell’alimentazione elettrica, che è diversa per l’uso residenziale rispetto all’uso industriale.
L’elettricità residenziale è monofase o bifase mentre l’elettricità per uso industriale è trifase, questa distinzione è la ragione della differenza tra i motori AC industriali e quelli residenziali.
I motori a corrente alternata sono indicati come motori a induzione poiché utilizzano la corrente elettrica per produrre coppia, che viene creata dall’induzione elettromagnetica dal campo magnetico dello statore.
Avviamento
Un motore CA può essere avviato da un semplice interruttore di accensione e spegnimento, che può essere un contattore o un avviatore manuale. Un contattore consente il controllo dell’alimentazione alternata a un motore CA. Gli avviatori manuali hanno un interruttore manuale che consente all’operatore di cambiare o modificare la potenza.
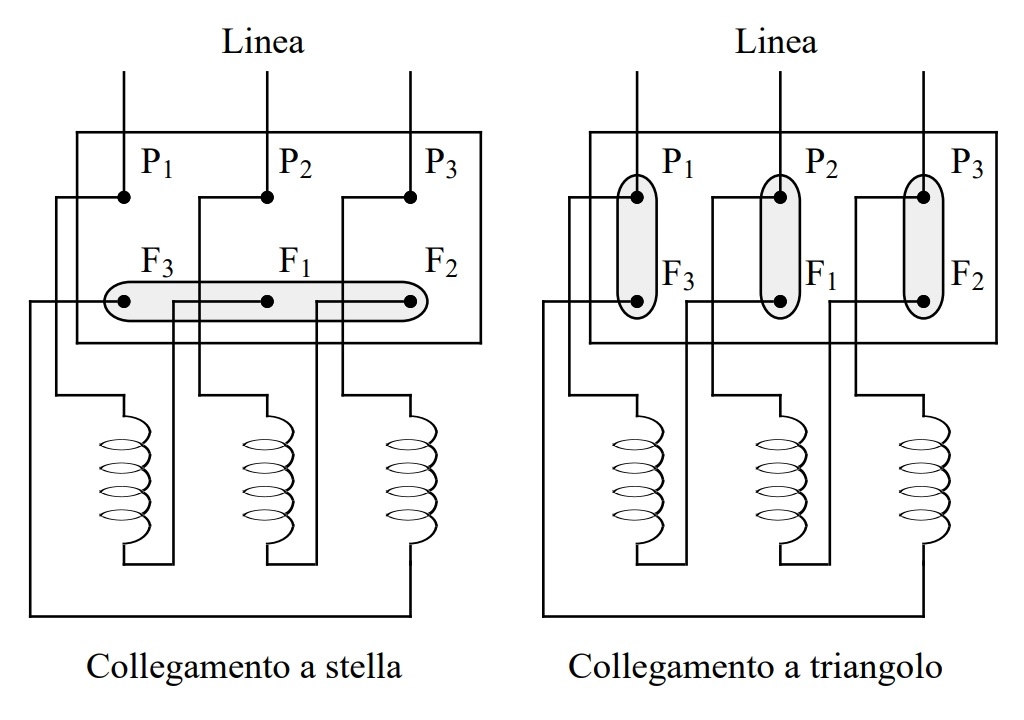
- Gli avviatori stella-triangolo sono tipi comuni di avviatori, che utilizzano un’alimentazione ridotta di tensione all’avviamento. Lo statore è collegato in una configurazione a stella, che passa a una configurazione a triangolo una volta che il motore raggiunge una certa velocità. In questo modo si riduce la corrente di linea applicata all’avviamento.
- Un avviatore del trasformatore automatico utilizza un metodo simile a quello dell’avviatore delta. Anche in questo caso, la corrente iniziale è limitata alla tensione ridotta applicata allo statore. Il vantaggio di un avviatore con trasformatore automatico è che la coppia e la corrente possono essere regolate .
- Un avviatore ad impedenza del rotore è collegato direttamente al rotore tramite gli anelli collettori e le spazzole. Inizialmente, la resistenza del rotore è impostata al massimo, ma diminuisce gradualmente all’aumentare della velocità del motore. Un avviatore ad impedenza del rotore è molto ingombrante e costoso.
- Gli avviatori statici sono una versione complessa, che consente il controllo dell’accelerazione e della decelerazione per arrestare e avviare il motore in modo fluido e uniforme, cosa non possibile con le versioni cross-the-line. Il vantaggio dei soft starter è la riduzione dell’usura del motore e dei dispositivi a cui è collegato.
Tieni conto che i motore asincrono polifase è caratterizzato dall’avere, all’avviamento (detto anche spunto), una coppia non molto grande e di assorbire invece una corrente notevolmente elevata.
La coppia di spunto è relativamente piccola perché la corrente che percorre i, circuiti rotorici è fortemente in ritardo sulla tensione indotta a causa dell’alto valore, rispetto alla resistenza rotorica, offerto dalla reattanza di dispersione che, all’avviamento, raggiunge per l’appunto il suo valore massimo (il campo magnetico di rotore è quindi pressoché in opposizione con il campo magnetico di statore per cui sono notevoli le azioni di forza radiali ma modeste quelle tangenziali dalle quali dipende la coppia).
Si comprende quindi come all’avviamento sia necessario diminuire l’intensità della corrente allo scopo di ridurre le cadute di tensione nella linea (e nel trasformatore) di alimentazione e anche per limitare il calore prodotto negli avvolgimenti in tale fase di funzionamento. Nello stesso tempo è opportuno aumentare il valore della coppia di spunto, per ridurre così l’intervallo di tempo durante il quale il motore rimane in regime transitorio e soprattutto anche per poter effettuare l’avviamento sotto carico (più o meno gravoso).
N.B. Poiché i motori monofase producono un campo magnetico pulsante, non sono in grado di avviarsi automaticamente, necessitano di una spinta manuale .
Statore
Lo statore produce un campo magnetico rotante. Nei motori a corrente alternata, l’elettricità viene inviata direttamente alle bobine dello statore.
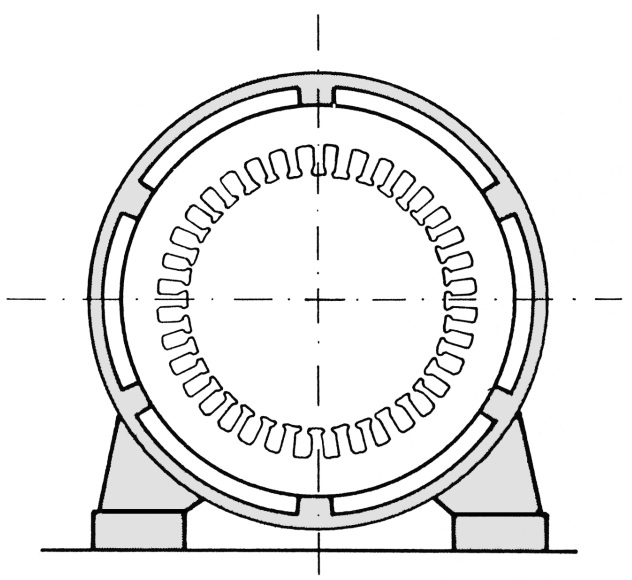
Statore di una macchina asincrona
Rotore
A differenza di un motore a corrente continua, il rotore di un motore a corrente alternata non ha alcun collegamento con la fonte di alimentazione esterna. Riceve la sua potenza dallo statore. In un motore a induzione trifase, il rotore può essere a gabbia di scoiattolo o in versione avvolta.
Rotore di una macchina asincrona
- Nella versione a gabbia di scoiattolo o motori con rotore in corto circuito, il rotore è costituito da barre del rotore con anelli terminali su entrambe le estremità. Nella maggior parte dei casi, la gabbia di scoiattolo è in alluminio o rame. Nel funzionamento di un motore a gabbia di scoiattolo, le barre del rotore interagiscono con il campo elettromagnetico dello statore detto anche EMF. Quando la corrente fluttua, l’EMF fa lo stesso facendo ruotare il rotore producendo un movimento rotatorio. Un fattore chiave nel movimento è che il rotore non gira alla stessa frequenza della corrente alternata e cerca costantemente di recuperare, ed è così che viene prodotta la rotazione. Se avesse la stessa frequenza, il rotore si bloccherebbe e non ci sarebbe alcun movimento.
Avviamento diretto
I motori di piccola potenza (fino a 10 kW) vengono avviati senza alcun accorgimento poiché la corrente assorbita allo spunto, pur essendo 4 -;- 8 volte quella nominale, risulta relativamente di piccola intensità e quindi non tale da creare inconvenienti notevoli agli impianti di alimentazione; la coppia di spunto di questi motori è sodd1Ùacente (Can prossimo o uguale (coppia di spunto nominali di avviamento ) 0,5 -;- l Ca dove si intende indicare la coppia di spunto
Avviamento ridotto
Per diminuire all’avviamento l’intensità della corrente assorbita dal motore con rotore a gabbia semplice, non essendo possibile inserire dei resistori nei circuiti rotorici, è necessario ricorrere a qualche artificio che abbassi temporaneamente la tensione di alimentazione del motore.
In questo modo, però, oltre che la corrente, si riduce anche la coppia perché questa, purtroppo, diminuisce proporzionalmente al quadrato della tensione applicata al motore .
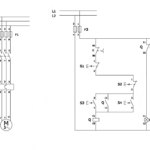
In pratica l’abbassamento di tensione può essere realizzato mediante autotrasformatore con una (figura – Lo schema del circuito di avviamento di un motore con rotore in corto circuito nel caso in cui si ricorra all’impiego di un adatto autotrasformatore (a) oppure alla commutazione stella-triangolo degli avvolgimenti di statore (b).).
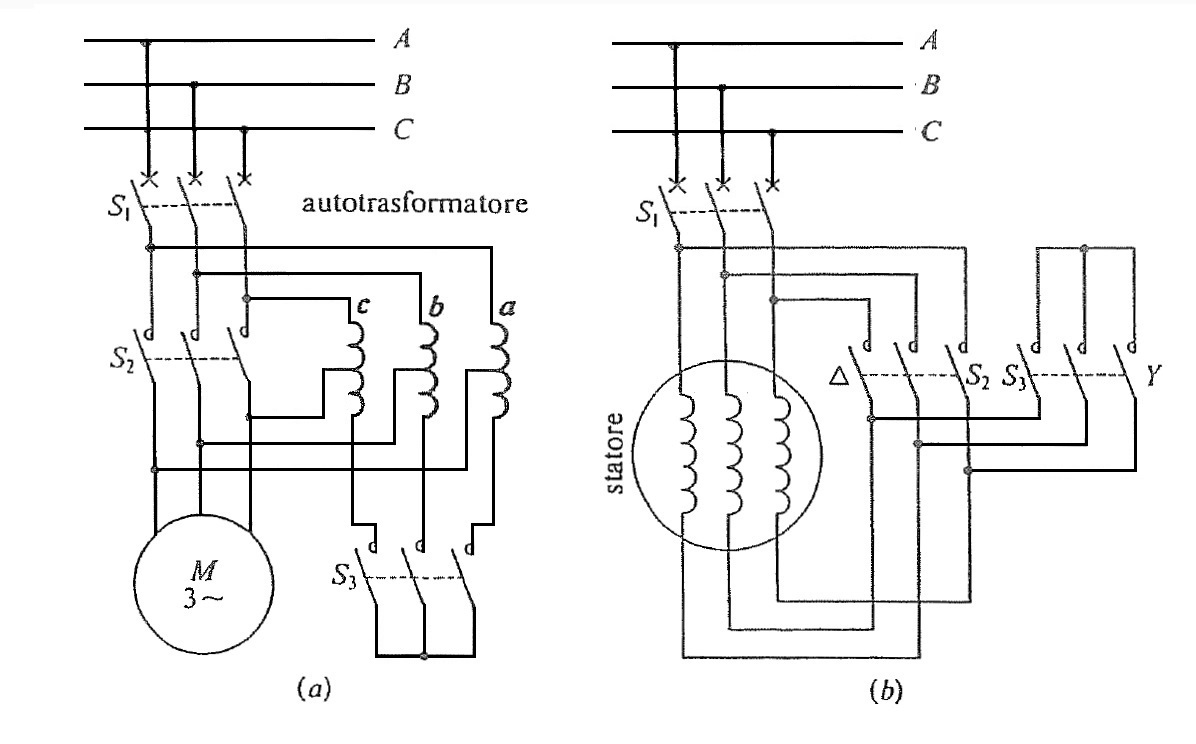
Le manovre per l’avviamento sono le seguenti. Si chiudono i contatti S3 e quindi i contatti S 1 : in tal modo il motore viene alimentato dalla tensione ridotta dell’autotrasformatore, successivamente, a motore avviato, si aprono i contatti S3 , cosicché il motore risulta alimentato ancora a tensione ridotta tramite le bobine di reattanza a, b, e, dell’autotrasformatore, quindi
si chiudono i contatti S2 che cortocircuitano le bobine di reattanza a, b, c.
- Un motore a corrente alternata avvolto o ad anello scorrevole è un tipo speciale di otore a corrente alternata. I motori avvolti sono asincroni dove c’è una differenza tra la velocità dello statore e la velocità di uscita. Quando si genera corrente nel rotore, il motore avrà uno slittamento tra il campo rotante e il rotore. Quando il motore è alimentato, il rotore diminuisce la forza dello statore, che consente il controllo della rotazione e la possibilità di scegliere le caratteristiche di coppia e di marcia.
Alcune osservazioni
La macchina asincrona, come già accennato, trova maggior impiego come motore e non come generatore perché, a differenza della macchina sincrona, non è in grado di produrre potenza reattiva induttiva. Infatti la macchina asincrona non possiede un circuito di eccitazione destinato appositamente alla generazione del flusso magnetico rotante: questo è prodotto dal circuito di carico (statore) il quale deve così assorbire anche la necessaria corrente magnetizzante. La macchina asincrona si comporta, a questo riguardo, come un trasformatore. Anzi si vedrà più avanti quali analogie esistono fra i due tipi di macchine elettriche ora citate.
I motori asincroni sono costruiti per tutte le potenze: da centesimi di kW a qualche decina di MW. Vengono realizzati inoltre per tutte le velocità bastando variare il numero dei poli (ed eventualmente il valore della frequenza).
Il comportamento statico e dinamico del motore asincrono è soddisfacente ragion per cui tale motore, risultando inoltre di costruzione robusta e molto economica e di funzionamento semplice, rappresenta il tipo più diffuso in tutte le applicazioni sia industriali sia di altro genere. Nel prossimo capitolo lo studio del funzionamento della macchina asincrona.
Motore sincrono
Come suggerisce il nome, il motore sincrono ha un rotore progettato per ruotare alla stessa velocità del campo magnetico rotante dello statore chiamato velocità sincrona; lo statore genera un campo magnetico rotazionale all’alimentazione di corrente alternata. Il rotore può essere progettato per generare il proprio campo magnetico utilizzando un’alimentazione CC esterna tramite anelli collettori o utilizzando un magnete permanente .
Il rotore è progettato per generare poli magnetici uguali o multipli integrali dei poli dello statore. Quando lo statore e il rotore sono eccitati, il campo magnetico del rotore viene bloccato con il campo magnetico rotazionale dello statore e ruota alla velocità esatta del campo dello statore.
A causa dell’inerzia, il motore sincrono non si avvia immediatamente alla velocità sincrona (campo magnetico rotante). Pertanto, un avvolgimento aggiuntivo chiamato ” avvolgimento damper ” viene utilizzato per fornire la coppia di spunto, funziona come un motore a induzione durante l’avvio. Quindi, suggerisce, i motori sincroni non si avviano automaticamente , hanno bisogno di un meccanismo di avviamento aggiuntivo.
Può essere un motore eccitato o non eccitato separatamente, ovvero il primo richiede una sorgente CC separata che eccita gli avvolgimenti del rotore e genera un campo magnetico mentre il secondo descrive un motore sincrono il cui rotore è progettato per essere magnetizzato dal campo magnetico dello statore rotazionale e ruota con esso.
Il rotore del motore sincrono ruota con velocità sincrona che dipende dalla frequenza di alimentazione e dai poli degli avvolgimenti dello statore. Pertanto, la velocità del motore non varia con il carico. Per variare la velocità di un motore sincrono è necessario variare la frequenza di alimentazione. Si ottiene utilizzando un convertitore di frequenza VFD .
Motore asincrono
Il nome del motore asincrono suggerisce che la velocità del rotore è asincrona con la velocità di rotazione del campo magnetico dello statore. Per l’esattezza, il rotore del motore asincrono ruota con una velocità relativamente minore rispetto allo statore RMF o campo magnetico rotante. È dovuto alla presenza di scorrimento tra il suo statore e la velocità del rotore.
Il rotore del motore asincrono è una gabbia di scoiattolo del tipo avvolto. Il rotore a gabbia di scoiattolo è costruito utilizzando pesanti barre di rame collegate all’estremità mediante un anello conduttivo che le cortocircuita elettricamente. Il rotore del tipo avvolto è costituito da più avvolgimenti sopra un nucleo laminato in acciaio.
Il campo magnetico rotazionale dello statore provoca una corrente indotta nel rotore. Questa corrente indotta scorre all’interno del rotore generando un proprio campo magnetico. Secondo la legge di Lenz, questo campo rotorico si oppone alla causa che lo genera e cerca di eliminarlo raggiungendo la velocità dello statore RMF (la velocità sincrona). In tal modo, il rotore ruota nella direzione dello statore RMF. Poiché funziona sul principio dell’induzione, quindi, il motore asincrono è anche noto come motore a induzione .
Il motore a induzione non può mai funzionare alla velocità sincrona invece è sempre più lenta della velocità sincrona e dipende dallo scorrimento del motore. Il motivo è che la corrente indotta nel rotore viene generata a causa della differenza tra il campo dello statore e del rotore. se, nel caso gira alla velocità sincrona, significa che il rotore è bloccato magneticamente e non c’è differenza tra campo statore e rotore. Pertanto, non ci sarebbe flusso magnetico per indurre corrente nel rotore. Il flusso magnetico è necessario per il motore a induzione, motivo per cui deve funzionare a una velocità inferiore rispetto alla sua velocità sincrona.
Il rotore a gabbia di scoiattolo ha un design più semplice e consente alla corrente indotta di fluire attraverso le barre di rame. Mentre il rotore avvolto consente all’utente di variare la corrente del rotore durante l’avvio come utilizzato in “Avviamento motore”. Il punto è avviare in sicurezza il motore riducendo l’enorme corrente di avviamento assorbita da un motore a induzione. Viene generalmente effettuato collegando un resistore variabile in serie agli avvolgimenti del rotore tramite collettori ad anello.
La velocità del motore asincrono dipende dallo scorrimento del motore che varia con il carico e la resistenza del rotore. In altre parole, la velocità del motore a induzione può variare con il carico o utilizzando una resistenza del rotore variabile.
Differenze tra motore sincrono e motore asincrono
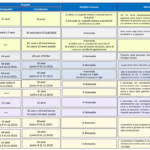
La tabella seguente mostra le principali differenze tra motore sincrono e motore asincrono (a induzione).
| Motore sincrono | Motore asincrono |
| Il motore sincrono è un tipo di motore CA che funziona a velocità sincrona. | Il motore asincrono è un tipo di motore a corrente alternata che funziona a velocità inferiore a quella sincrona. |
| Funziona secondo il principio dell’interblocco magnetico tra campo rotore e statore. | Funziona secondo il principio dell’induzione elettromagnetica tra statore e rotore. |
| Non c’è scorrimento cioè lo scorrimento del motore sincrono è uguale a 0. | C’è slittamento nel motore a induzione ed è sempre maggiore di 0. |
| La velocità del motore dipende dalla frequenza di alimentazione e dal numero di poli dello statore.
N s = 120 f / P |
La velocità del motore dipende dal carico, dalla resistenza del rotore e dallo scorrimento, s. è sempre inferiore alla velocità sincrona.
N = N s (1-s) N < N s |
| La velocità non varia al variare del carico collegato al motore. | La velocità varia al variare del carico del motore. |
| Non si avvia automaticamente e richiede avvolgimenti extra per avviare il motore. | I motori asincroni sono ad avviamento automatico e non richiedono un meccanismo aggiuntivo. |
| Il rotore richiede un’alimentazione di corrente supplementare. | Il rotore del motore a induzione non necessita di alimentazione aggiuntiva. |
| Il motore sincrono eccitato separatamente richiede una sorgente CC aggiuntiva per eccitare il suo avvolgimento del rotore. | Non richiede alcuna fonte aggiuntiva. |
| Ha anche bisogno di anelli collettori e spazzole per fornire corrente continua ai suoi avvolgimenti del rotore. | Non richiede anelli di contatto, tuttavia, il tipo di ferita può utilizzare anelli di contatto per controllare la velocità. |
| La velocità del motore è controllata solo variando la frequenza di alimentazione tramite un convertitore di frequenza VFD. | La velocità del motore può essere controllata utilizzando la resistenza del rotore variabile e dispositivi VFD. |
| L’alimentazione della tensione di ingresso non varia la velocità o la coppia del motore sincrono. | L’alimentazione della tensione di ingresso può essere utilizzata per variare la coppia e la velocità del motore. |
| Le fluttuazioni della tensione di alimentazione principale non influiscono sul funzionamento del motore sincrono. | La fluttuazione della tensione di rete ne influenza la velocità e il funzionamento. |
| Il costo iniziale è maggiore del motore a induzione. | I motori a induzione sono più economici. |
| È l’operazione è complicata. | È il funzionamento è semplice e facile da usare. |
| Se offrono grande efficienza e precisione. | Non sono efficienti come il motore sincrono. |
| Può essere facilmente azionato a velocità molto bassa utilizzando VFD. | È abbastanza difficile operare a bassa velocità. |
| Funziona meglio a velocità inferiori, generalmente inferiori a 300 giri/min. | È più adatto per il funzionamento a velocità superiori a 600 giri/min. |
| Può essere azionato in ritardo, anticipo o fattore di potenza unitario regolando la sua eccitazione. | Il motore a induzione o asincrono funziona sempre con un fattore di potenza in ritardo. |
| Può essere utilizzato anche per la correzione del fattore di potenza allo stesso tempo utilizzandolo nel fattore di potenza principale. | Non può essere utilizzato per correggere il fattore di potenza ma solo per pilotare carichi meccanici. |
| Poiché funziona a velocità costante, una variazione improvvisa del carico causerà fluttuazioni nella corrente assorbita. | Non esiste un tale fenomeno nel motore a induzione. |
La conclusione di questo articolo è che i motori sincroni sono efficienti ma più costosi e vengono utilizzati per applicazioni a bassissimo numero di giri, offrendo allo stesso tempo funzionalità di correzione del fattore di potenza. D’altra parte, i motori a induzione sono utilizzati per applicazioni ad alto numero di giri con velocità variabile pur essendo economici e più facili da usare.
Ps. Se sei interessato puoi leggere un articolo riguardante gli effetti del campo magnetico sul corpo umano.